Bounding box in 3d ambient space. More...
#include <bounding_box.hh>
Public Types | |
| typedef Space< dimension >::Point | Point |
| Currently we assume. More... | |
Public Member Functions | |
| TYPEDEF_ERR_INFO (EI_split_point, double) | |
| TYPEDEF_ERR_INFO (EI_interval_left, double) | |
| TYPEDEF_ERR_INFO (EI_interval_right, double) | |
| DECLARE_EXCEPTION (ExcSplitting,<< "Split point "<< EI_split_point::val<< "out of bounds: <"<< EI_interval_left::val<< ", "<< EI_interval_right::val<< ">\n") | |
| BoundingBox () | |
| BoundingBox (const Point &min) | |
| BoundingBox (const Point &min, const Point &max) | |
| BoundingBox (const vector< Point > &points) | |
| void | set_max (unsigned int axis, double max) |
| void | set_min (unsigned int axis, double min) |
| const Point & | min () const |
| const Point & | max () const |
| double | min (unsigned int axis) const |
| double | max (unsigned int axis) const |
| double | size (unsigned int axis) const |
| Point | center () const |
| double | projection_center (unsigned int axis) const |
| bool | contains_point (const Point &point) const |
| bool | intersect (const BoundingBox &b2) const |
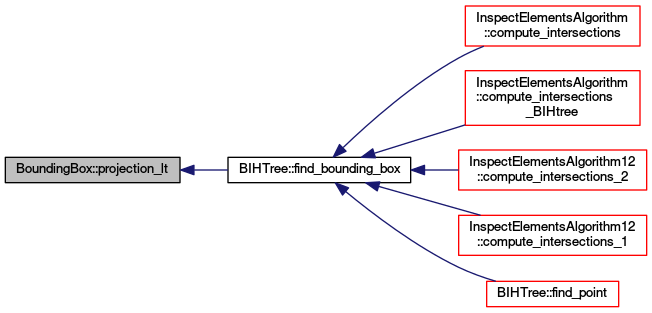
| bool | projection_lt (unsigned int axis, double value) const |
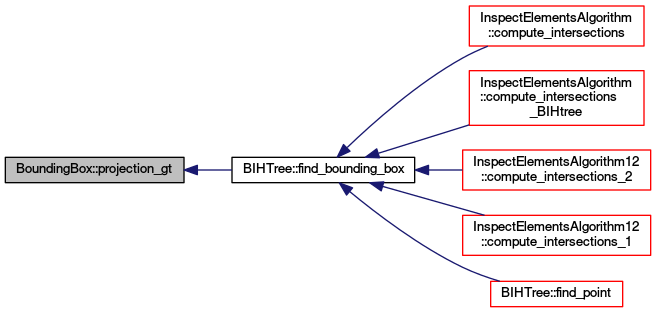
| bool | projection_gt (unsigned int axis, double value) const |
| void | split (unsigned int axis, double splitting_point, BoundingBox &left, BoundingBox &right) const |
| void | expand (const Point &point) |
| void | expand (const BoundingBox &box) |
| unsigned char | longest_axis () const |
| Point | project_point (const Point &point) const |
Static Public Attributes | |
| static const unsigned int | dimension = 3 |
| Currently we set dimension to 3. More... | |
| static const double | epsilon = 64*numeric_limits<double>::epsilon() |
| stabilization parameter More... | |
Private Attributes | |
| Point | min_vertex_ |
| minimal coordinates of bounding box More... | |
| Point | max_vertex_ |
| maximal coordinates of bounding box More... | |
Detailed Description
Bounding box in 3d ambient space.
Primary intention is usage in BIHTree and various speedups of non-compatible intersections.
Copy constructor and assignment are default provided by compiler. These can be used to set bounds latter on without particular method to this end:
Don;t worry about performance, all is inlined.
Definition at line 54 of file bounding_box.hh.
Member Typedef Documentation
| typedef Space<dimension>::Point BoundingBox::Point |
Currently we assume.
Definition at line 68 of file bounding_box.hh.
Constructor & Destructor Documentation
|
inline |
Default constructor. No initialization of vertices. Be very careful using this. One necessary usage is vector of BoundigBox.
Definition at line 76 of file bounding_box.hh.
|
inline |
Constructor for point box.
Definition at line 86 of file bounding_box.hh.
Member Function Documentation
|
inline |
Return center of the bounding box.
Definition at line 166 of file bounding_box.hh.
|
inline |
Returns true is the box element contains point
- Parameters
-
point Testing point
- Returns
- True if box element contains point
Definition at line 185 of file bounding_box.hh.
| BoundingBox::DECLARE_EXCEPTION | ( | ExcSplitting | ) |
|
inline |
Expand bounding box to contain also given point.
Definition at line 253 of file bounding_box.hh.
|
inline |
Expand bounding box to contain also given box.
Definition at line 264 of file bounding_box.hh.
|
inline |
Returns true if two bounding boxes have intersection.
This serves as an estimate of intersection of elements. To make it safe (do not exclude possible intersection) for 1d and 2d elements aligned with axes, we use some tolerance. Since this tolerance is fixed, there could be problem with highly refined meshes (get false positive result).
Definition at line 203 of file bounding_box.hh.
|
inline |
Return index of the axis in which the box has longest projection.
Definition at line 275 of file bounding_box.hh.

|
inline |
Return maximal vertex of the bounding box.
Definition at line 136 of file bounding_box.hh.
|
inline |
Return maximal value on given axis.
Definition at line 150 of file bounding_box.hh.
|
inline |
Return minimal vertex of the bounding box.
Definition at line 129 of file bounding_box.hh.

|
inline |
Return minimal value on given axis.
Definition at line 143 of file bounding_box.hh.
Project point to bounding box.
If point is in bounding box, returns its.
Definition at line 287 of file bounding_box.hh.

|
inline |
Return center of projection of the bounding box to given axis. Axis coding is: 0 - axis x, 1 - axis y, 2 - axis z.
Definition at line 174 of file bounding_box.hh.
|
inline |
Returns true if projection of the box to axis is an interval greater then (with tolerance) to given value.
Definition at line 225 of file bounding_box.hh.
|
inline |
Returns true if projection of the box to axis is an interval less then (with tolerance) to given value.
Definition at line 216 of file bounding_box.hh.
|
inline |
Set maximum in given axis.
Definition at line 111 of file bounding_box.hh.

|
inline |
Set minimum on given axis.
Definition at line 120 of file bounding_box.hh.

|
inline |
Return size of the box in given axis.
Definition at line 158 of file bounding_box.hh.
|
inline |
Split box into two boxes along axis by the plane going through splitting_point on the axis.
Definition at line 234 of file bounding_box.hh.
| BoundingBox::TYPEDEF_ERR_INFO | ( | EI_split_point | , |
| double | |||
| ) |
| BoundingBox::TYPEDEF_ERR_INFO | ( | EI_interval_left | , |
| double | |||
| ) |
| BoundingBox::TYPEDEF_ERR_INFO | ( | EI_interval_right | , |
| double | |||
| ) |
Member Data Documentation
|
static |
Currently we set dimension to 3.
Definition at line 64 of file bounding_box.hh.
|
static |
stabilization parameter
Definition at line 66 of file bounding_box.hh.
|
private |
maximal coordinates of bounding box
Definition at line 303 of file bounding_box.hh.
|
private |
minimal coordinates of bounding box
Definition at line 301 of file bounding_box.hh.
The documentation for this class was generated from the following files:
- /opt/flow123d/flow123d/src/mesh/bounding_box.hh
- /opt/flow123d/flow123d/src/mesh/bounding_box.cc
