|
| template<class ET > |
| void | resize_table (typename Eigen::Vector< ET, Eigen::Dynamic > &table, uint size) |
| | Resize vector of Eigen::Array to given size. More...
|
| |
| template<class T > |
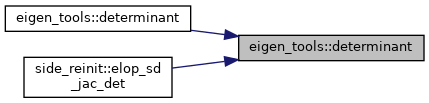
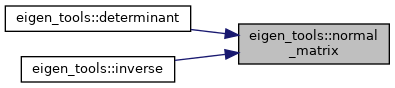
| ArrayDbl | determinant (const T &M) |
| | Calculates determinant of a rectangular matrix. More...
|
| |
| Eigen::Matrix< ArrayDbl, 1, 1 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 1, 2 > &A) |
| |
| Eigen::Matrix< ArrayDbl, 1, 1 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 2, 1 > &A) |
| |
| Eigen::Matrix< ArrayDbl, 1, 1 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 1, 3 > &A) |
| |
| Eigen::Matrix< ArrayDbl, 1, 1 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 3, 1 > &A) |
| |
| Eigen::Matrix< ArrayDbl, 2, 2 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 2, 3 > &A) |
| |
| Eigen::Matrix< ArrayDbl, 2, 2 > | normal_matrix (const Eigen::Matrix< ArrayDbl, 3, 2 > &A) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 1, 1 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 2, 2 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 3, 3 > &M) |
| |
| template<> |
| ArrayDbl | determinant (FMT_UNUSED const Eigen::Matrix< ArrayDbl, 0, 3 > &M) |
| |
| template<> |
| ArrayDbl | determinant (FMT_UNUSED const Eigen::Matrix< ArrayDbl, 3, 0 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 1, 2 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 2, 1 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 1, 3 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 3, 1 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 2, 3 > &M) |
| |
| template<> |
| ArrayDbl | determinant (const Eigen::Matrix< ArrayDbl, 3, 2 > &M) |
| |
| template<int m, int n> |
| Eigen::Matrix< ArrayDbl, n, m > | inverse (const Eigen::Matrix< ArrayDbl, m, n > &A) |
| | Calculates inverse of rectangular matrix or pseudoinverse of non-rectangular matrix. More...
|
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 1, 1 > | inverse< 1, 1 > (const Eigen::Matrix< ArrayDbl, 1, 1 > &A) |
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 2, 2 > | inverse< 2, 2 > (const Eigen::Matrix< ArrayDbl, 2, 2 > &A) |
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 3, 3 > | inverse< 3, 3 > (const Eigen::Matrix< ArrayDbl, 3, 3 > &A) |
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 2, 1 > | inverse< 1, 2 > (const Eigen::Matrix< ArrayDbl, 1, 2 > &A) |
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 3, 1 > | inverse< 1, 3 > (const Eigen::Matrix< ArrayDbl, 1, 3 > &A) |
| |
| template<> |
| Eigen::Matrix< ArrayDbl, 3, 2 > | inverse< 2, 3 > (const Eigen::Matrix< ArrayDbl, 2, 3 > &A) |
| |
| template<unsigned int spacedim, unsigned int dim> |
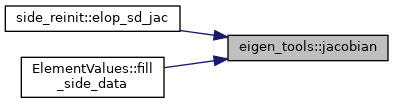
| Eigen::Matrix< ArrayDbl, spacedim, dim > | jacobian (const Eigen::Matrix< ArrayDbl, spacedim, dim+1 > &coords) |
| |